Michael’s research concerns the prediction, control, and assurance of systems with partially unknown dynamics, merging computationally efficient reachability tools with learning-based methods to produce high-probability reachable set overapproximations which can be used to derive and verify safe controllers for such systems.
Prediction
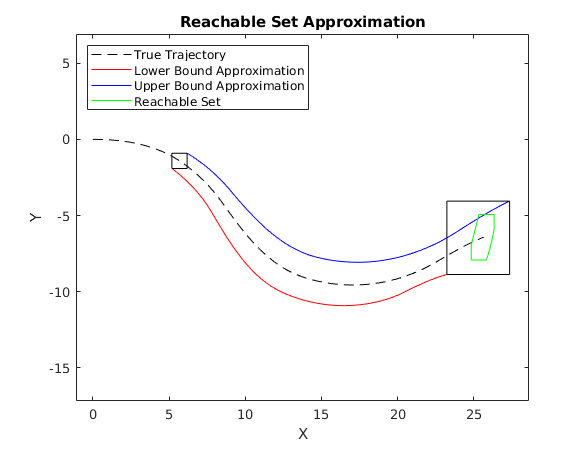
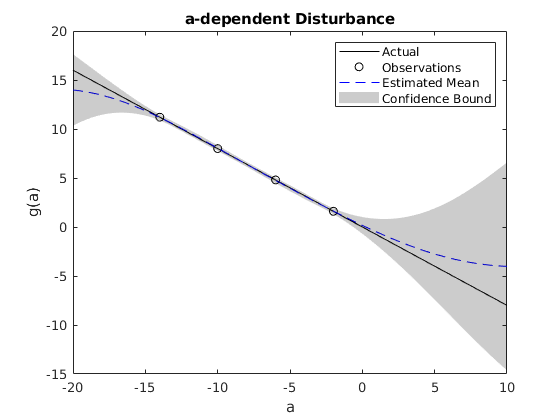
Given a system with partially unknown dynamics, leverage the mixed monotonicity property of dynamical systems and Gaussian processes to compute high probability reachable set overapproximations. These sets overapproximate the true set of possible future states that the system may encounter with high probability. Thus, by certifying that these set overapproximations are safe, one can certify that the underlying system is safe. These overapproximations can also be updated as observations of the unknown dynamics are gathered.
Relevant Publications
Control
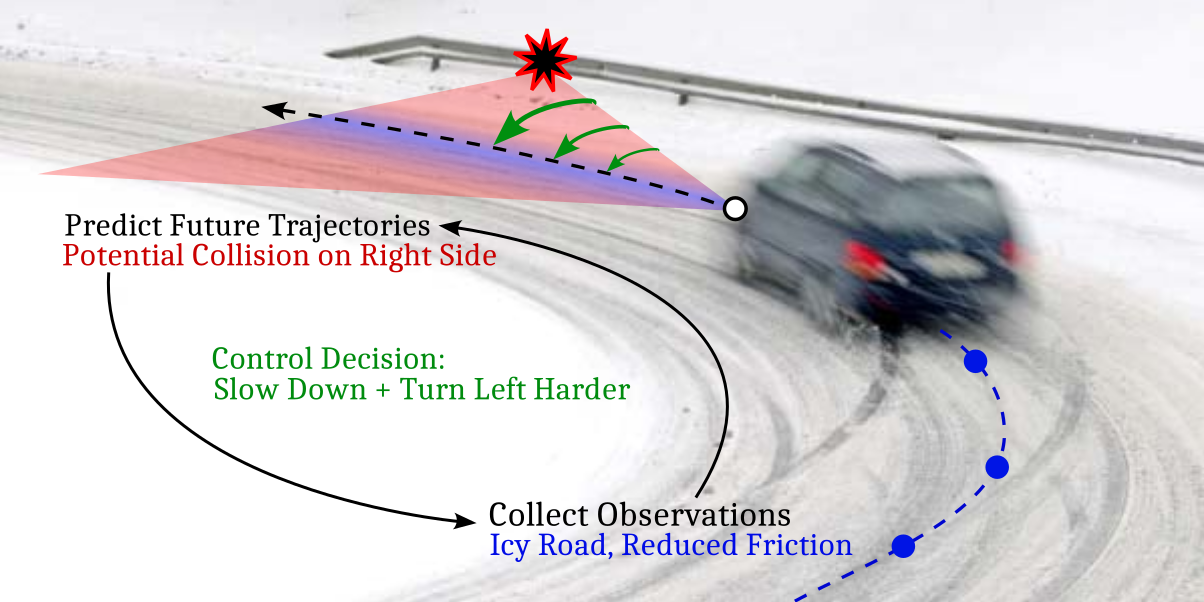
When the dynamics of a controlled system are not fully known, a common approach is to apply control actions to explore and observe the behavior of the system and adjust the control strategy as new information is collected. However, the process of collecting observations must be designed so as not to lead to unsafe behavior. Thus, a model predictive control scheme is developed, incorporating the previously developed high-probability reachable sets, to compute verifiably safe control strategies to guide a system towards a goal region while avoiding unsafe regions.
Relevant Publications
Assurance
Safety-critical autonomous systems often require guarantees that they will only operate within an allowable safe region of their statespace. This is often achieved via the computation of safe trajectories. However, if the system dynamics are partially unknown, the system is not guaranteed to track the trajectory. Thus, a runtime assurance mechanism is developed using the previously outlined prediction tools to detect when unknown dynamics may cause the system to violate safety via deviation from the safe reference trajectory, and trigger corrective behavior.
Relevant Publications
Case Studies
These methods are applicable to practical, real-world scenarios, as illustrated by various case studies and presentations.